Morpho Visual Calibrator™ 導入事例
~複数カメラの一括キャリブレーションと定量評価で、工数削減と品質向上を実現~

自動運転用オープンソースソフトウェア「Autoware」を軸に、国内外で多様な自動運転車両を開発する株式会社ティアフォー。同社は2025年、自動運転車両に搭載される複数カメラのキャリブレーション効率化を目的に、「Morpho Visual Calibrator™」 を導入した。本記事では、"マーカーレス × 同時キャリブレーション"がどのような課題を解決し、どのような効果を生み出したのか、プロダクト担当者に話を伺った。
自動運転車両においては年々カメラを含むセンサーの使用が増加し、キャリブレーションの開発工数が課題となっている。ティアフォー社も例外ではない。バスをはじめ多様な自動運転車両を開発する同社では、複数カメラのキャリブレーションが開発工程のボトルネックになりつつあった。
「Autoware」をベースとし、ユーザーが指定するコンピューター、センサー、車両を用い、目的に合わせた自動運転のユースケースを構築可能とするソフトウェアプラットフォーム「Pilot.Auto」のプロダクトマネージャー・木村氏は、その重要性をこう語る。
「自動運転において、センシングは最も重要な要素の一つです。センサーのキャリブレーションが不正確であると、周囲の交通参加者の位置認識に誤差が生じ、思わぬアクシデントにつながる恐れがあります。そのため、キャリブレーションは安全性を左右する極めて重要な工程です。」
一方で、同社が扱う自動運転車両には複数のセンサーが搭載されており、特にカメラの台数の増加に伴い、キャリブレーション工数が比例して増大していた。木村氏は「キャリブレーションの精度を担保しながら、短期間で完了させることが課題となっていました」と振り返る。
従来は、LiDARとカメラ間のキャリブレーションを、ターゲットマーカーを用いて実施。しかし、マーカーを配置する作業員とPCを操作する作業員の2名体制が必須となり、人的リソースの確保が課題となっていた。

さらに、マーカーの配置位置や角度といった微妙な違いがキャリブレーションの精度に影響を与えるため、作業を習得するには時間を要し、作業員の負担も大きかった。
モビリティアプリケーション本部にて主にセンサーキャリブレーションのツール開発を担当する村木氏は「キャリブレーション精度のバラつきによってやり直しが発生すれば、後工程のスケジュールに影響が出てしまう。こうした課題に対処する必要性は感じていましたが、従来の手法でも一定の精度は出ていたため、なかなか工数削減までは手が回らない状況でした」と、当時の状況を振り返る。
ティアフォー社が抱えていた課題は、運用面と技術面の両面にあった。
(1)運用負荷

転機となったのは、ティアフォー社が2024年11月にモルフォ社を訪問し、小型ロボットを使ったキャリブレーションデモを実際に見学したことだった。木村氏は当時を振り返り「実際に動くデモ機を見たことで、弊社の工程への採用余地があると感じました」と語る。

しかし、マーカーレスかつカメラ間のキャリブレーションという技術は、同社にとって未知の領域だった。村木氏も「従来と同程度の精度が本当に出るのかという懸念もありました。
一方で、カメラの台数が多いため、これを一度にキャリブレーションできることには工数削減の期待が持てました」と、デモの見学によって導入イメージが持てた。
そこで同社は、まず実際に試してみることを決断し、PoCを通じて精度検証を行うことにした。PoCでは、ティアフォー側がデータを取得し、モルフォがキャリブレーションを実行、その精度を同社で確認するというプロセスで進められた。
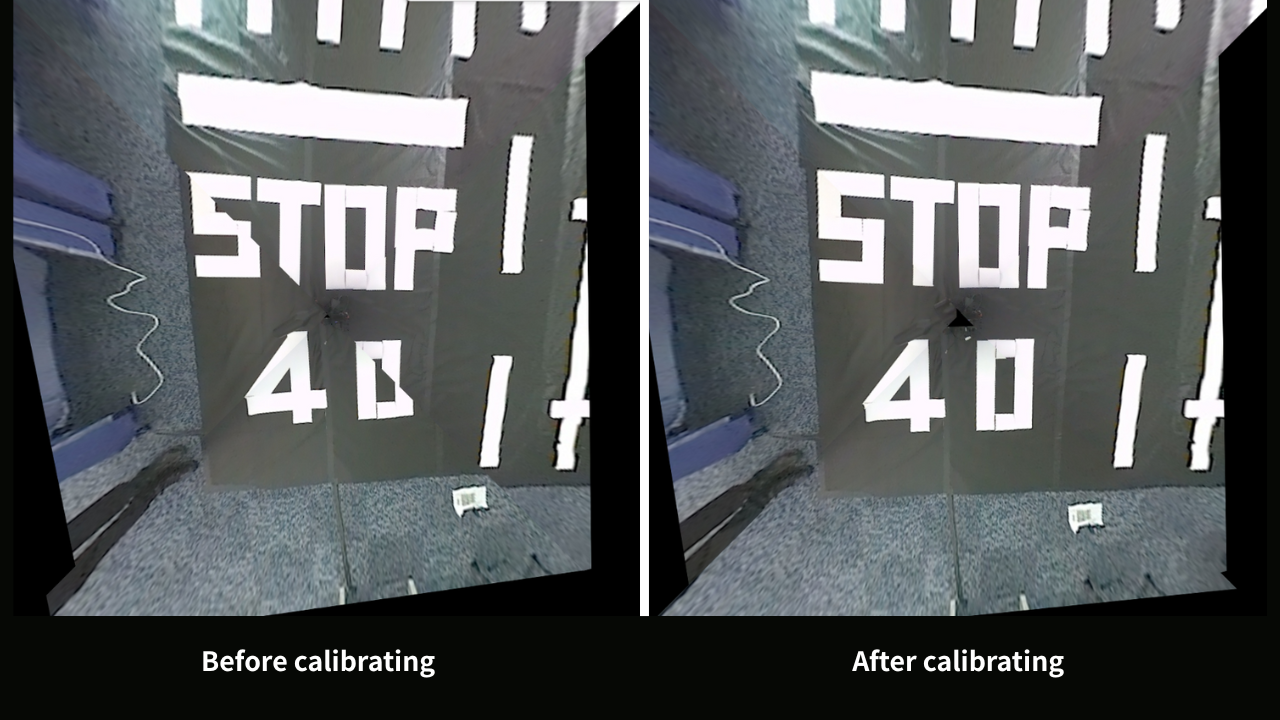
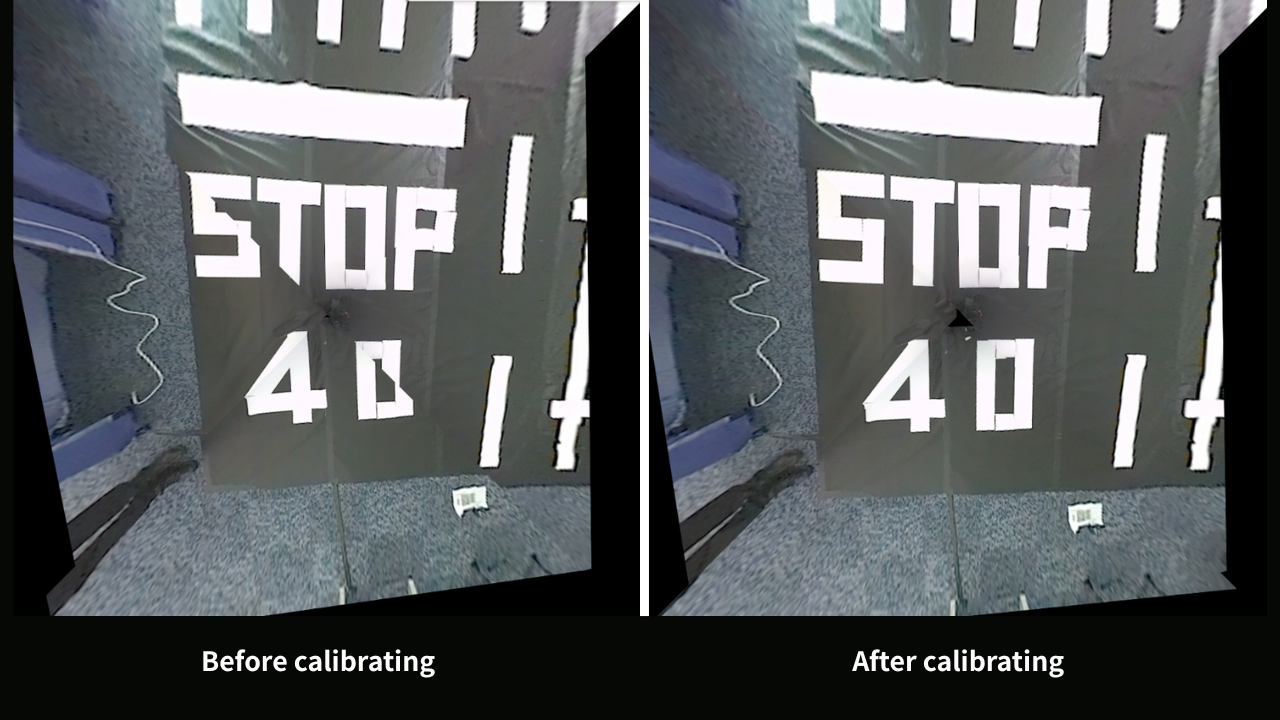
■PoC①:基本的な精度検証
村木氏は「サンプル数はまだ少なかったものの、実際にいただいた結果を確認すると、従来手法と同程度の精度が確認でき、ファーストインプレッションとして手応えがありました」と評価する。
■PoC②:推定パラメーターの信頼度導出の検証
同社から要望のあった推定パラメーターの信頼度導出の検証を実施。キャリブレーション精度の定量的評価という新たな価値も確認された。
村木氏は「今まで主観的な評価が中心だったので、定量的な評価が入ることで、より精度が高く安定したキャリブレーションが行えるのではないかと期待しました」と語る。
2025年9月のライセンス導入後、同社では段階的に現場への展開を進めている。最も大きな効果が、キャリブレーション工数の大幅削減だ。
「元々の目的でもあったのですが、一度に全てのカメラのキャリブレーションができるので、キャリブレーション工数が大幅に削減できる見込みです」と、村木氏はその効果を説明する。導入直後の時点で、実データで試した際には、処理の煩雑さや処理にかかる時間が大幅に削減されることが確認されており「早く現場に導入して、工数を実際に削減していきたい」と期待を寄せる。
また、屋外作業という環境特性上、特に寒冷期における作業者の身体的負担軽減も期待される。「このキャリブレーションは現在屋外での作業になりますので、特にこれから寒い時期になると、作業者の身体的な負担や、数字で測れない部分の負担削減も効果として見込めるのではないかと思っています」と村木氏は付け加えた。
技術面では、2回目のPoCで検証したように信頼度評価による定量的な品質管理が可能になったことが大きな進歩として評価された。
「今まで主観的な評価が中心だったので、定量的な評価が入ってくることで、より精度が高く安定したキャリブレーションが行えるのではないかと思っています」と村木氏は語る。
また、モルフォのサポート体制も高く評価されている。
村木氏は「弊社は社内のコミュニケーションツールにSlackを使っていますが、モルフォ社ともSlackを通じて普段と変わらないスムーズなコミュニケーションができました。また、PoCを進めるにあたってのデータ変換についても、必要なタイミングで柔軟にご対応いただけたので、既存データをスムーズにSDKに入力して評価することができました」とのコメントを寄せました。

ティアフォー社では、バス以外にもさまざまな車両を開発しており、公道や閉鎖空間など幅広い環境で自動運転車両が活用されている。そのため、どの車両でも安定してキャリブレーションできる仕組みは重要だ。
木村氏は今後について「当社ではバス以外の車両も構築しており、どの車両もカメラが多く搭載されているため、カメラのキャリブレーションはどの車両においても重要な技術です。今後、バス以外にもどんどん展開していきたい」と今後の展開にも意欲を示す。
また、「運用中もキャリブレーションの要否が判断できるような技術や、カメラだけでなくLiDAR側のキャリブレーションへの展開も期待しています」と、今後のMorpho Visual Calibratorの開発に対しても期待を寄せている。
モルフォは今後も、自動運転車両の開発におけるキャリブレーション技術の高度化と効率化を支援していく予定である。

Morpho Visual Calibrator™について
オートキャリブレーション技術
「Morpho Visual Calibrator™」は、AIを利用して車載カメラで撮影した映像から即座にカメラの位置関係を推定するためのキャリブレーション技術です。
Copyright© Morpho, Inc. All rights reserved.